mavros_tutorial
How to change mode of Ardupilot-SITL Rover
Author: Masoud Iranmehr
Github Page: github.com/masoudir/mavros_tutorial
Initialize
Please follow steps mentioned in this link
Change vehicle mode
Change vehicle mode using MAVProxy or Ardupilot-SITL
Get mode
If you want to see the last mode of vehicle, you can just looking for the name before “>” character in these terminals.
Set mode
Also if you want to change the mode, you can send your commands directly from your terminal provided by MAVProxy or SITL. For example if you want to change vehicle mode to “GUIDED”, you can type this command:
GUIDED- Change mode to GUIDED
Also you can view all of available modes for your vehicle via this command:
mode- Shows all available modes
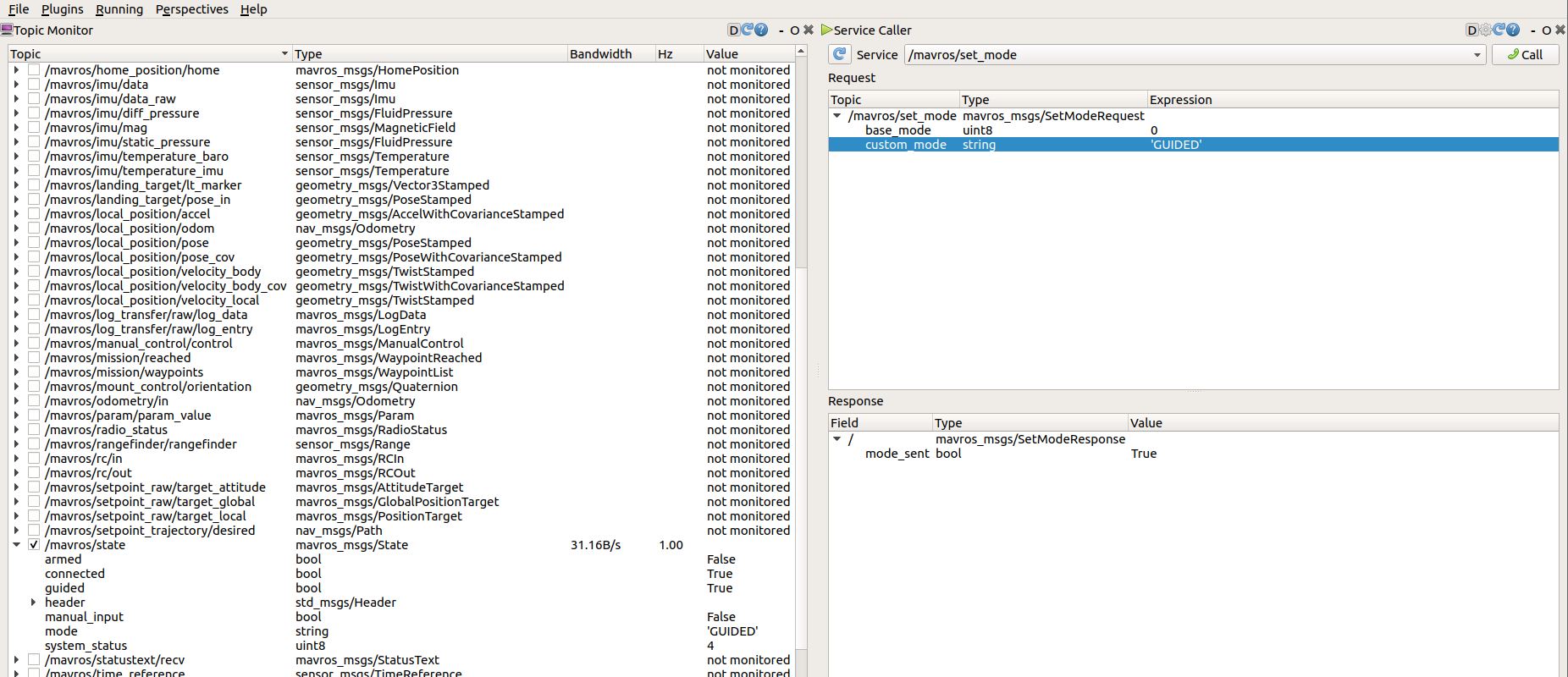
Change vehicle mode using ROS rqt:
At first you need to add two plugin from rqt:
Plugins -> Topics -> Topic Monitor
Plugins -> Services -> Service Caller
Then in “Topic Monitor” side, you have to tick the topic of “/mavros/state” to view its contents, so that you can get the vehicle mode and also some other parameters such as “arm status” and “Guided status”.
Then in “Service Caller” side, you have to select “/mavros/set_mode” and then in the field of “custom_mode”, you can set your vehicle mode. Then click on “call” button to send this message. The result should be as follow:
Change vehicle mode using ROS command lines
Get mode
If you want to see the last mode of the vehicle, you can just type this command:
rostopic echo /mavros/state- Returns all contents of /mavros/state topic periodically
The results should be as similar as this:
---
header:
stamp: 09
secs: 1595198641
nsecs: 651358095
frame_id: ''
connected: True
guided: False
manual_input: True
mode: "MANUAL"
system_status: 4
---
You can find the mode in the field of “mode” of the result shown.
Set mode
You need to call a ros service in order to do that. Just follow these commands:
rosservice info /mavros/set_mode- To see its arguments and type of its Class Message
This command gives you this result:
Node: /mavros
URI: rosrpc://ubuntu:42571
Type: mavros_msgs/SetMode
Args: base_mode custom_mode
“mavros_msgs/SetMode” is the type of this service srv file and “Args” are our input arguments, but we have to know their types, so that we type this command:
rossrv show mavros_msgs/SetMode- Getting details of the mentioned srv file
This will result as below:
uint8 MAV_MODE_PREFLIGHT=0
uint8 MAV_MODE_STABILIZE_DISARMED=80
uint8 MAV_MODE_STABILIZE_ARMED=208
uint8 MAV_MODE_MANUAL_DISARMED=64
uint8 MAV_MODE_MANUAL_ARMED=192
uint8 MAV_MODE_GUIDED_DISARMED=88
uint8 MAV_MODE_GUIDED_ARMED=216
uint8 MAV_MODE_AUTO_DISARMED=92
uint8 MAV_MODE_AUTO_ARMED=220
uint8 MAV_MODE_TEST_DISARMED=66
uint8 MAV_MODE_TEST_ARMED=194
uint8 base_mode
string custom_mode
---
bool mode_sent
In this case, “custom_mode” is the parameter needs to being configured and its type is “string”. For example if you want to change the vehicle mode to “GUIDED” follow this command:
rosservice call /mavros/set_mode "custom_mode: 'GUIDED'"- Change vehicle mode to “GUIDED”
Another method is to use “rosrun” command:
-
rosrun mavros mavsys mode -c MANUAL- If you want to change mode to “MANUAL” -
rosrun mavros mavsys mode -b <ENUM VALUE>- If you want to use “base_mode” to change mode